

Professor: Panagiotis Michalatos
Course: MDes Technology Final Thesis




Part Published in ACADIA 2017
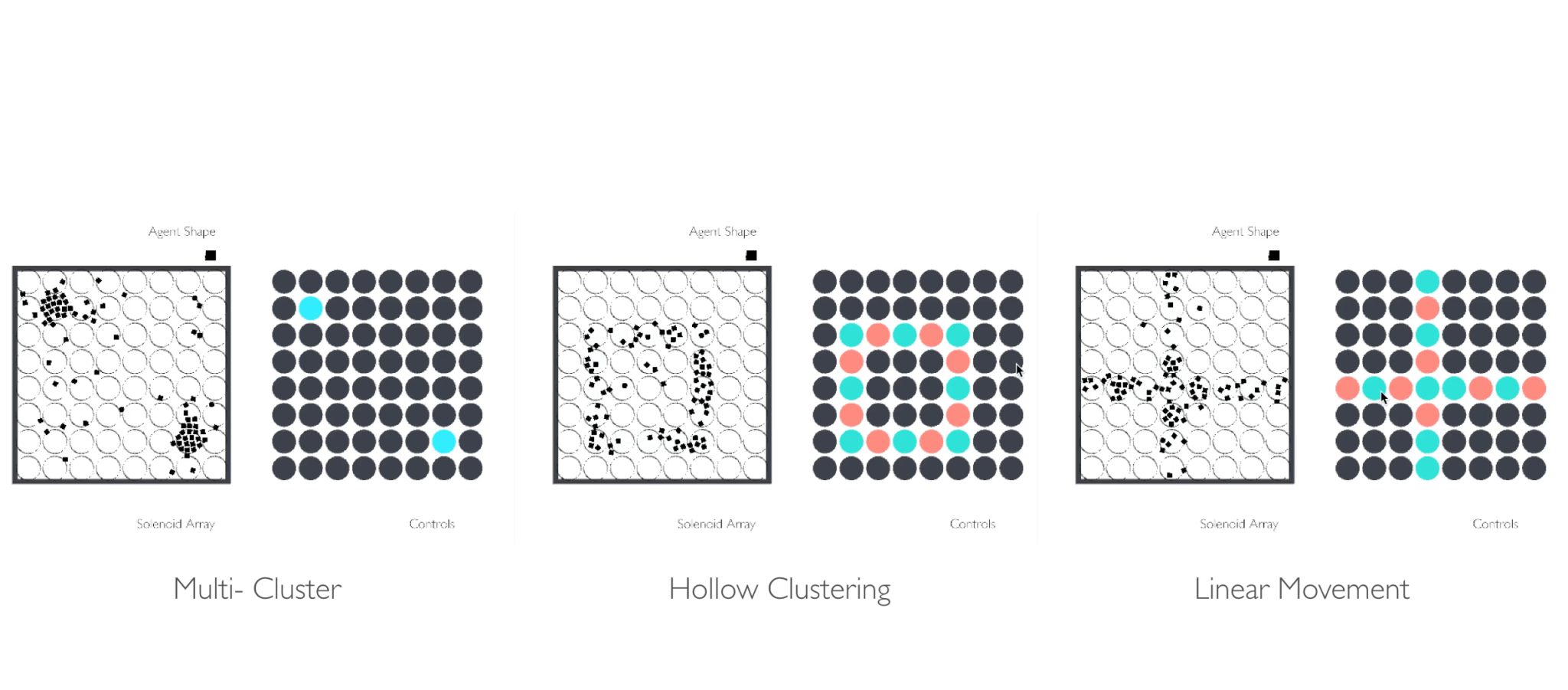
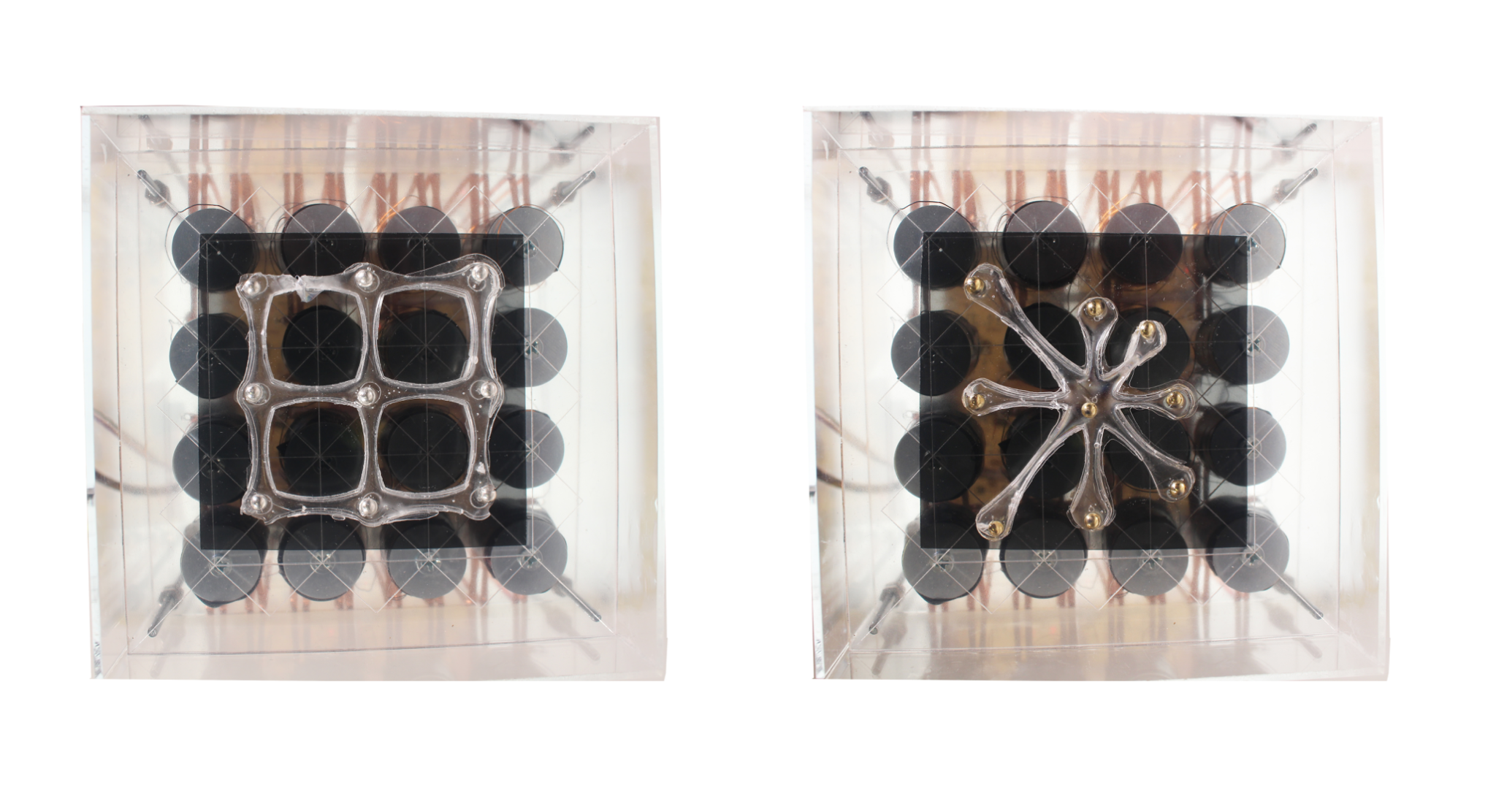
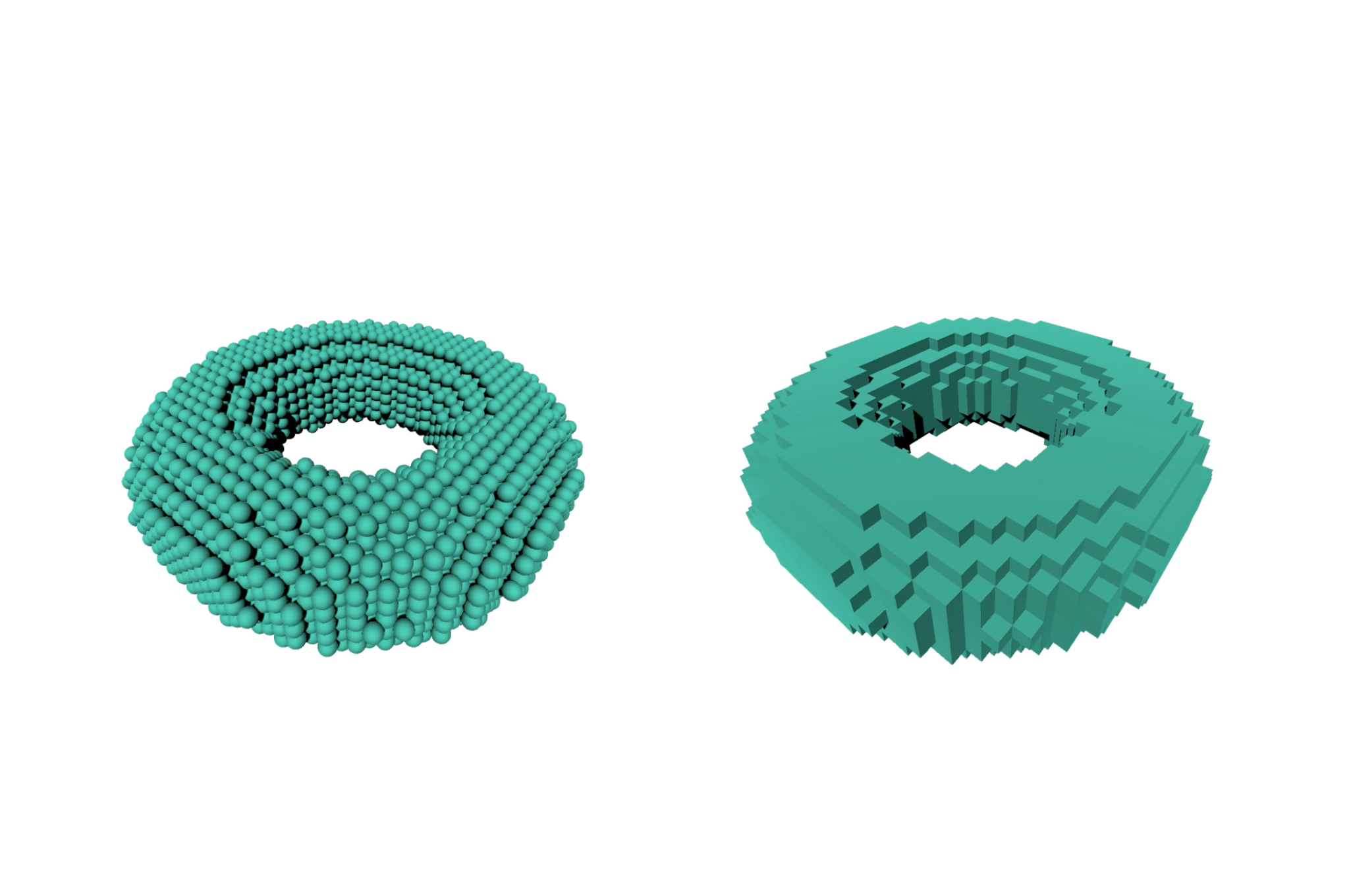
In an attempt to design shape-morphing multifunctional objects, this thesis uses programmable matter to design self-organizing multi-agent systems capable of morphing from one shape into another. The research looks at various precedents of self-assembly and modular robotics to design and prototype passive agents that could be cheaply mass-produced. Intelligence will be embedded into these agents on a material level, designing different local interactions to perform different global goals.
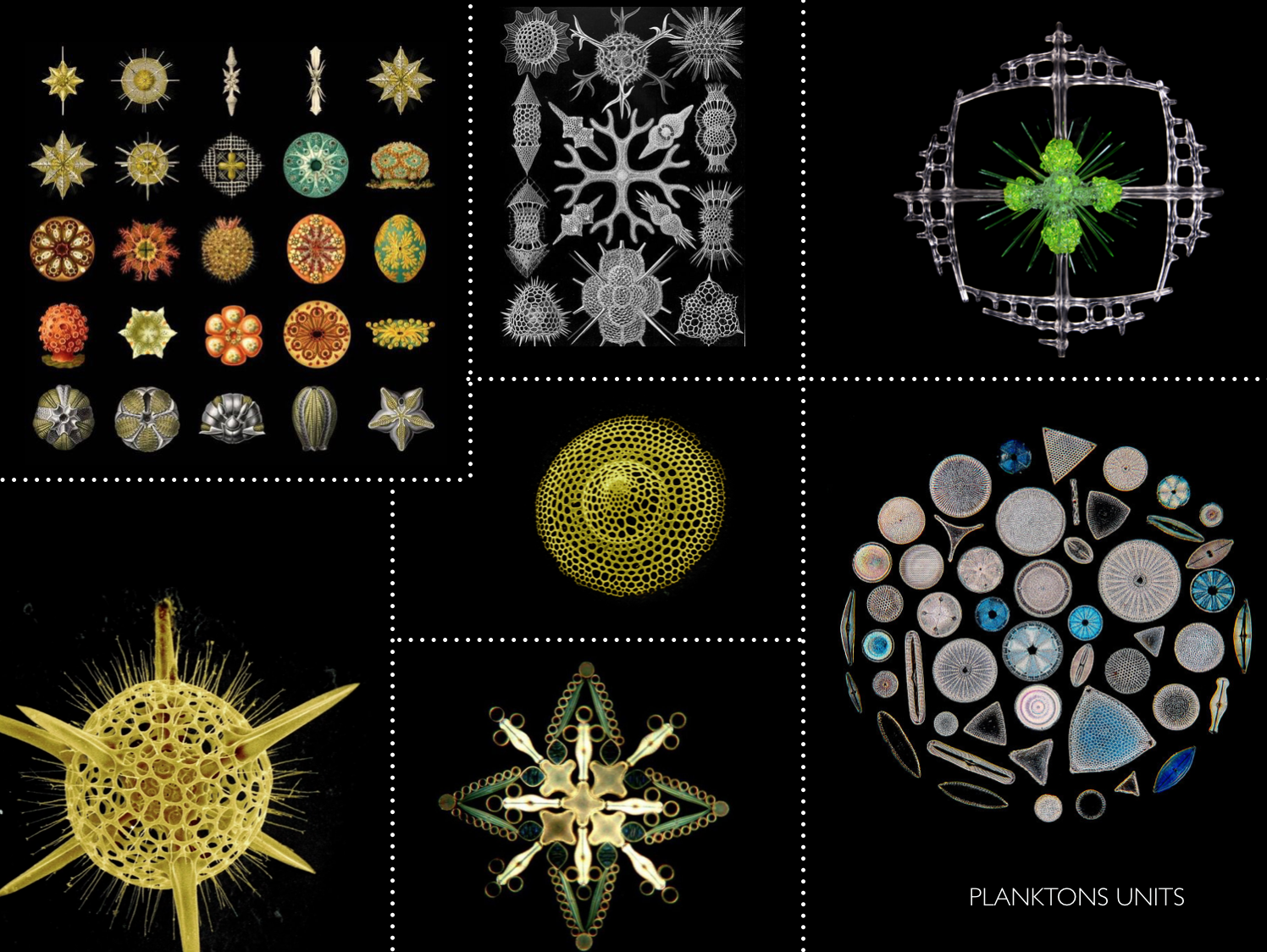
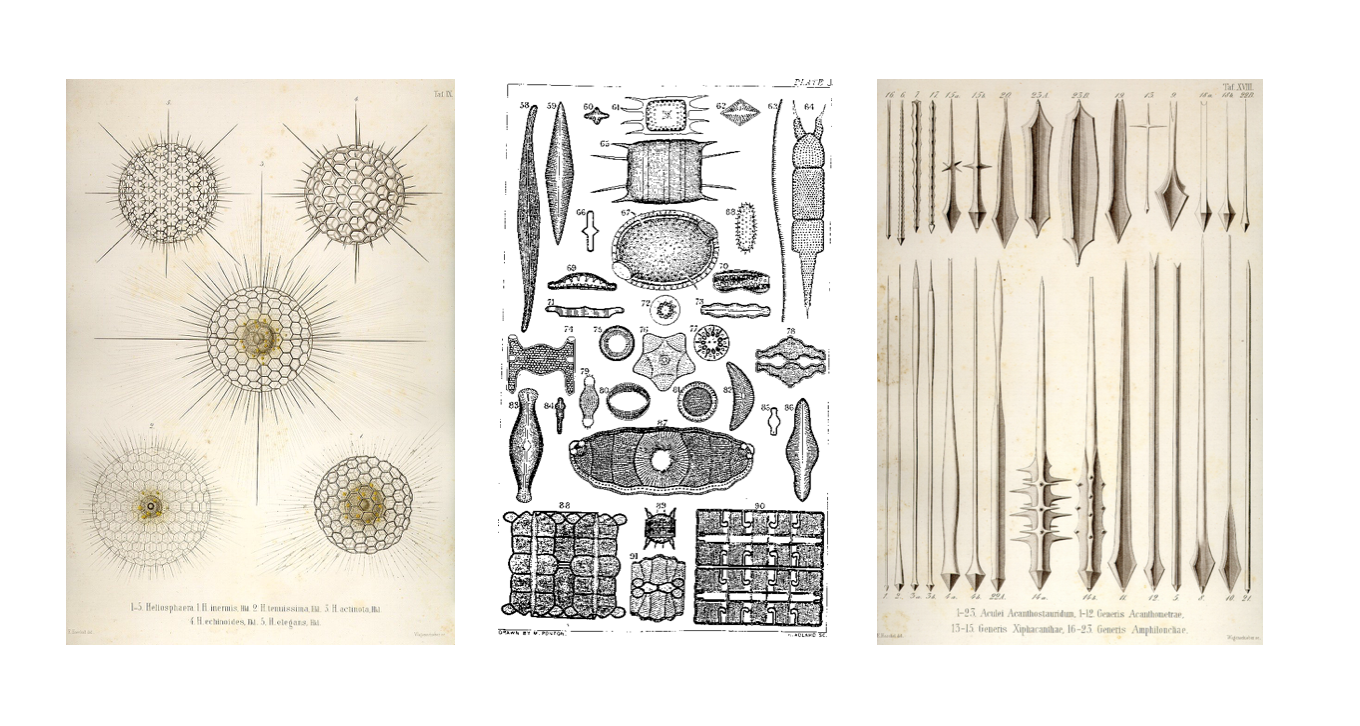
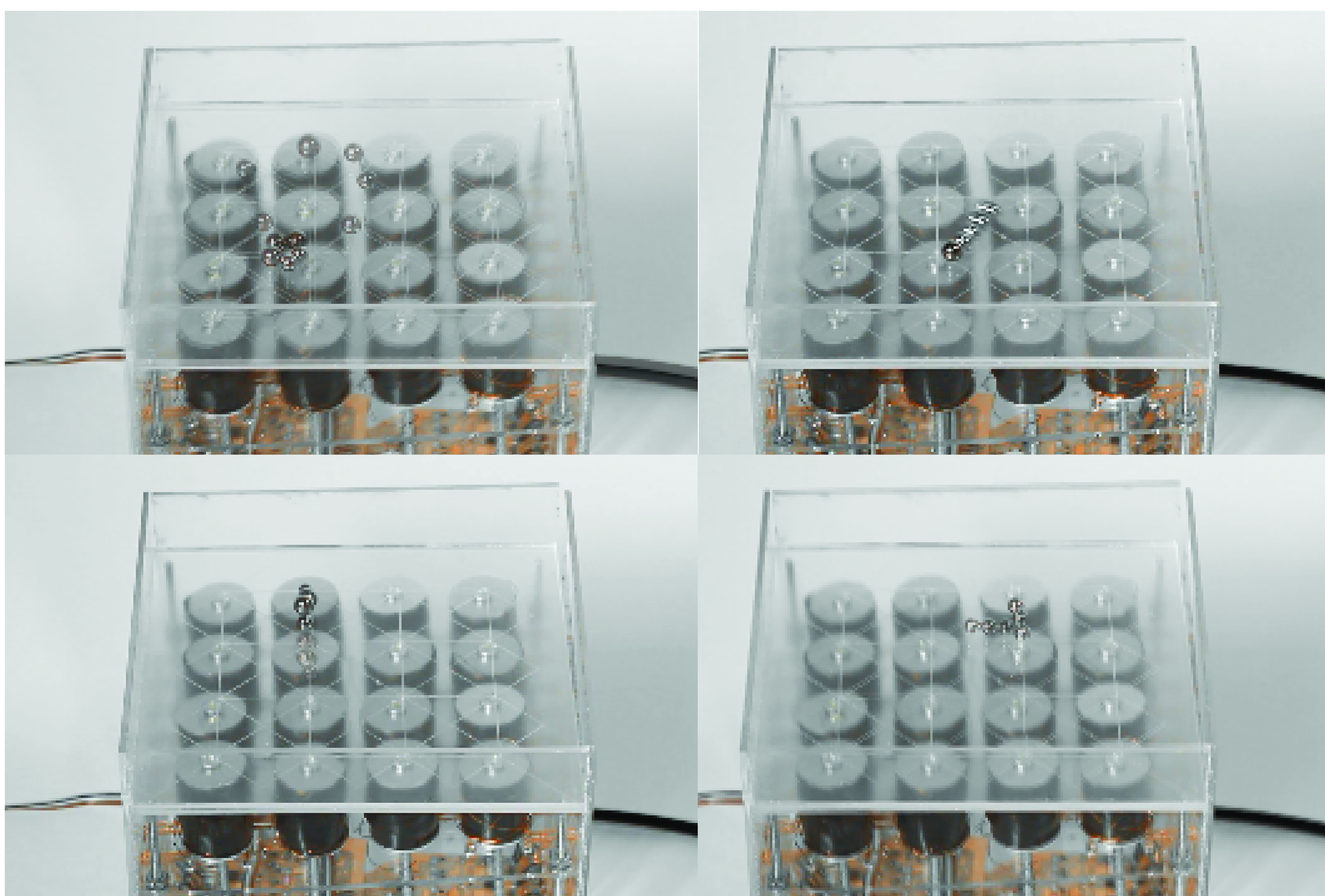
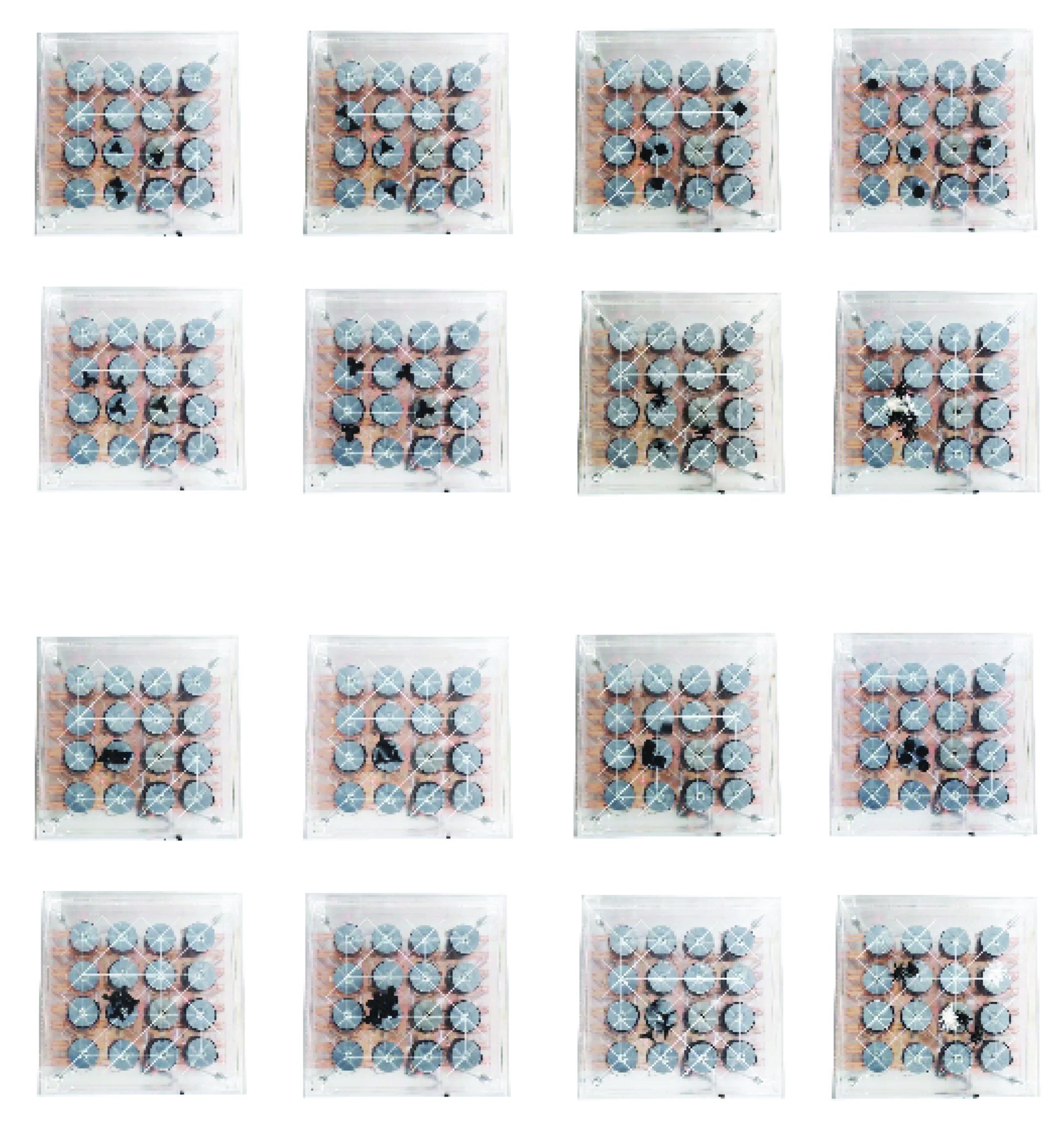
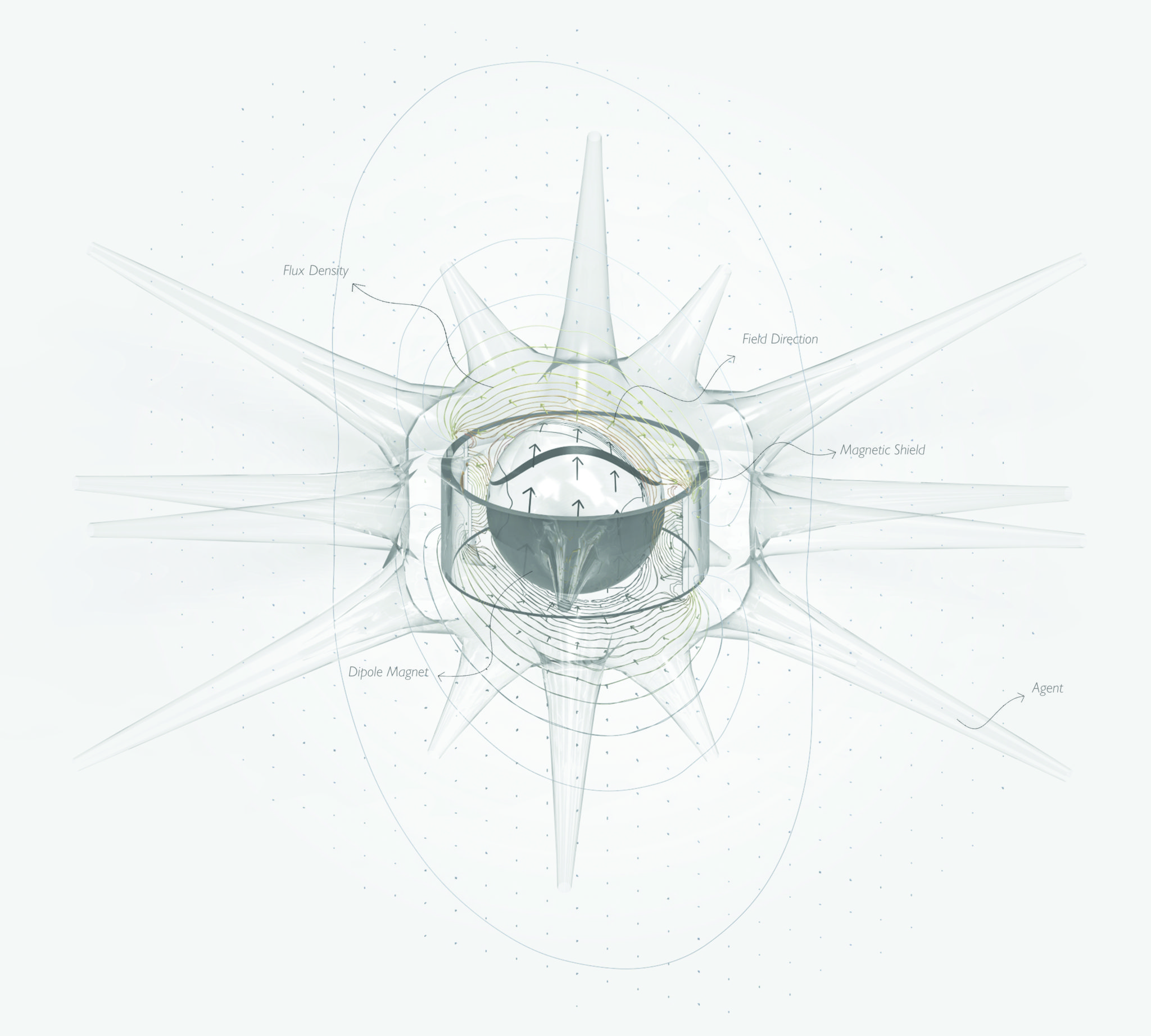
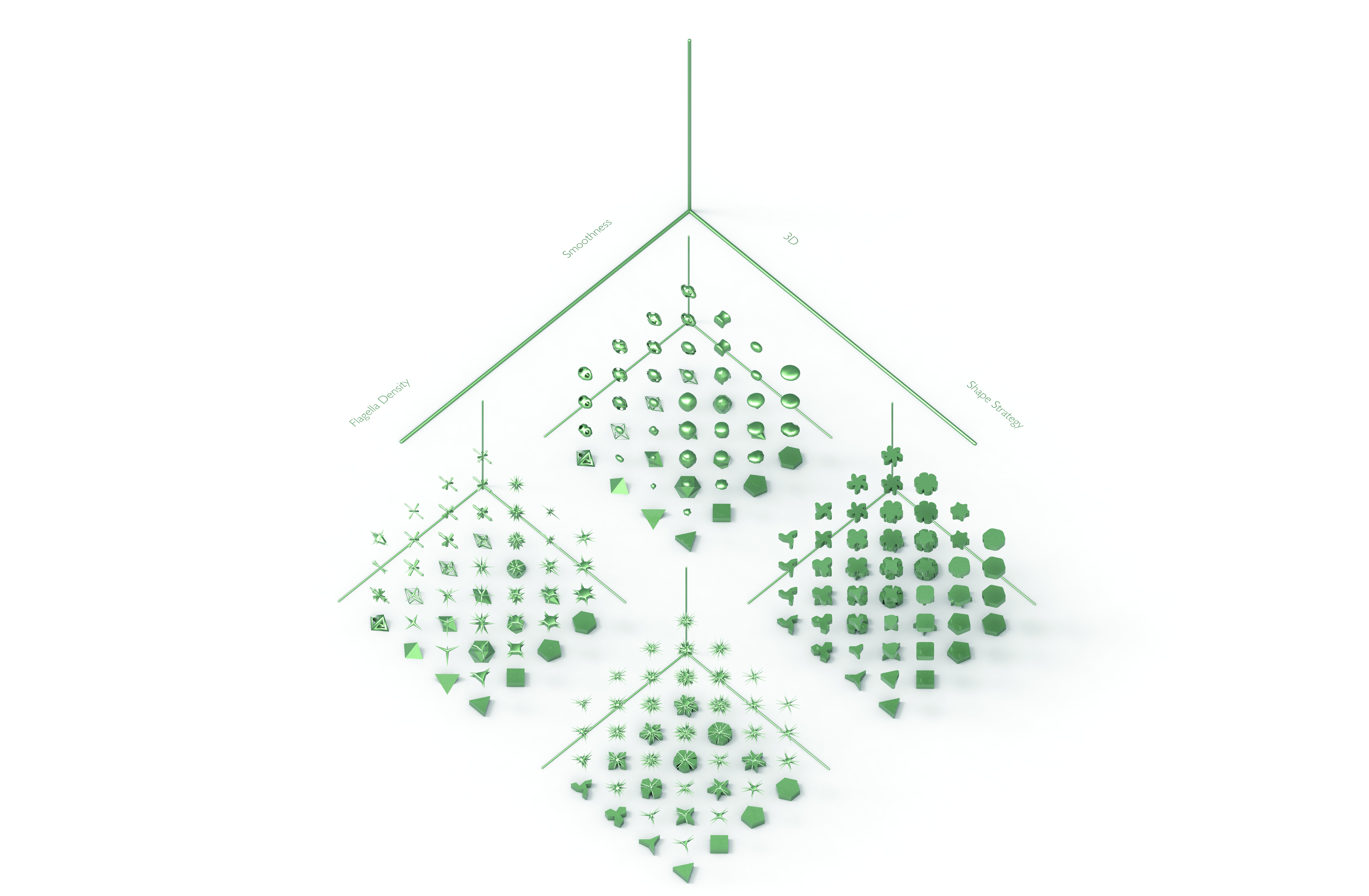
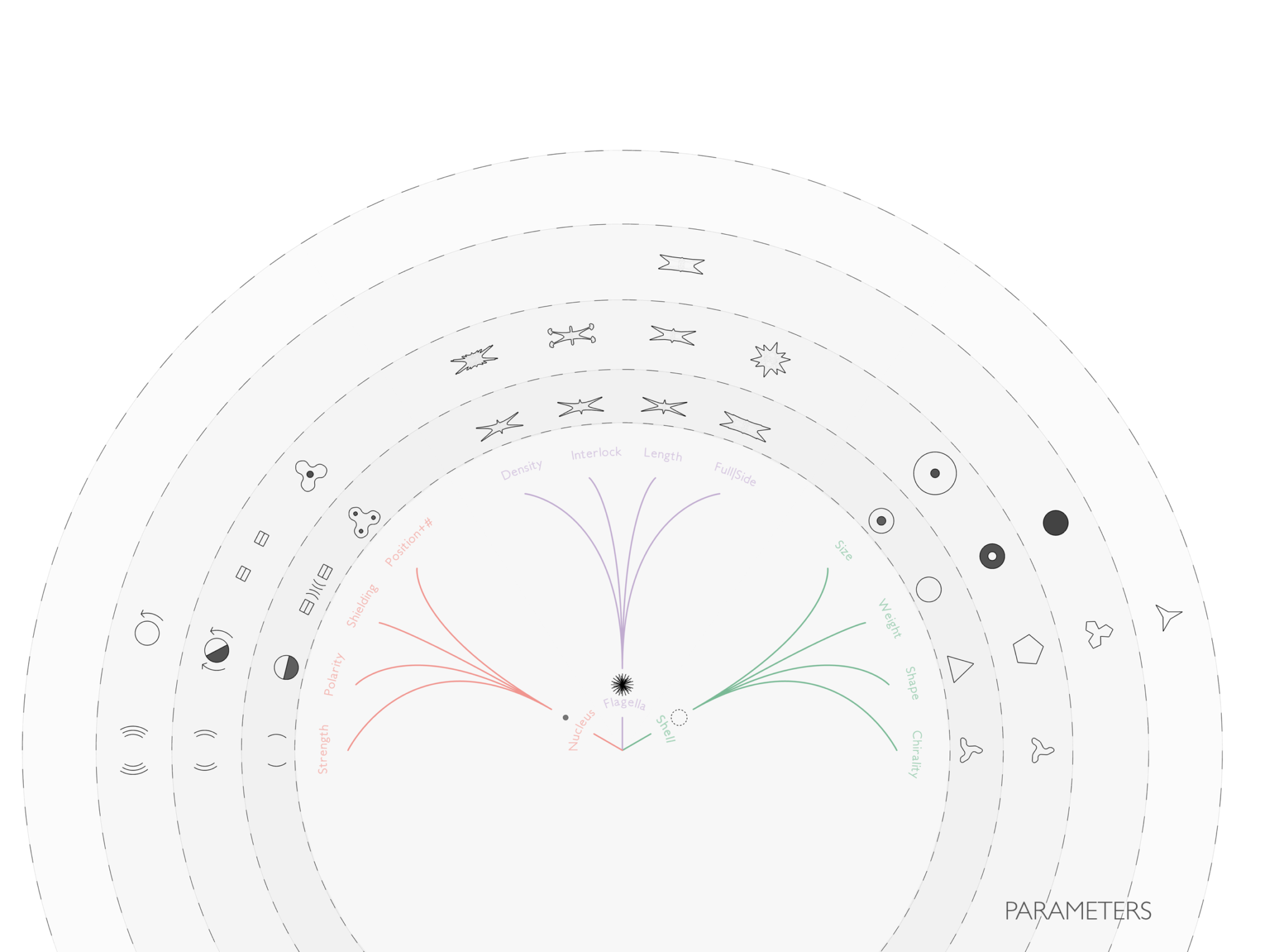
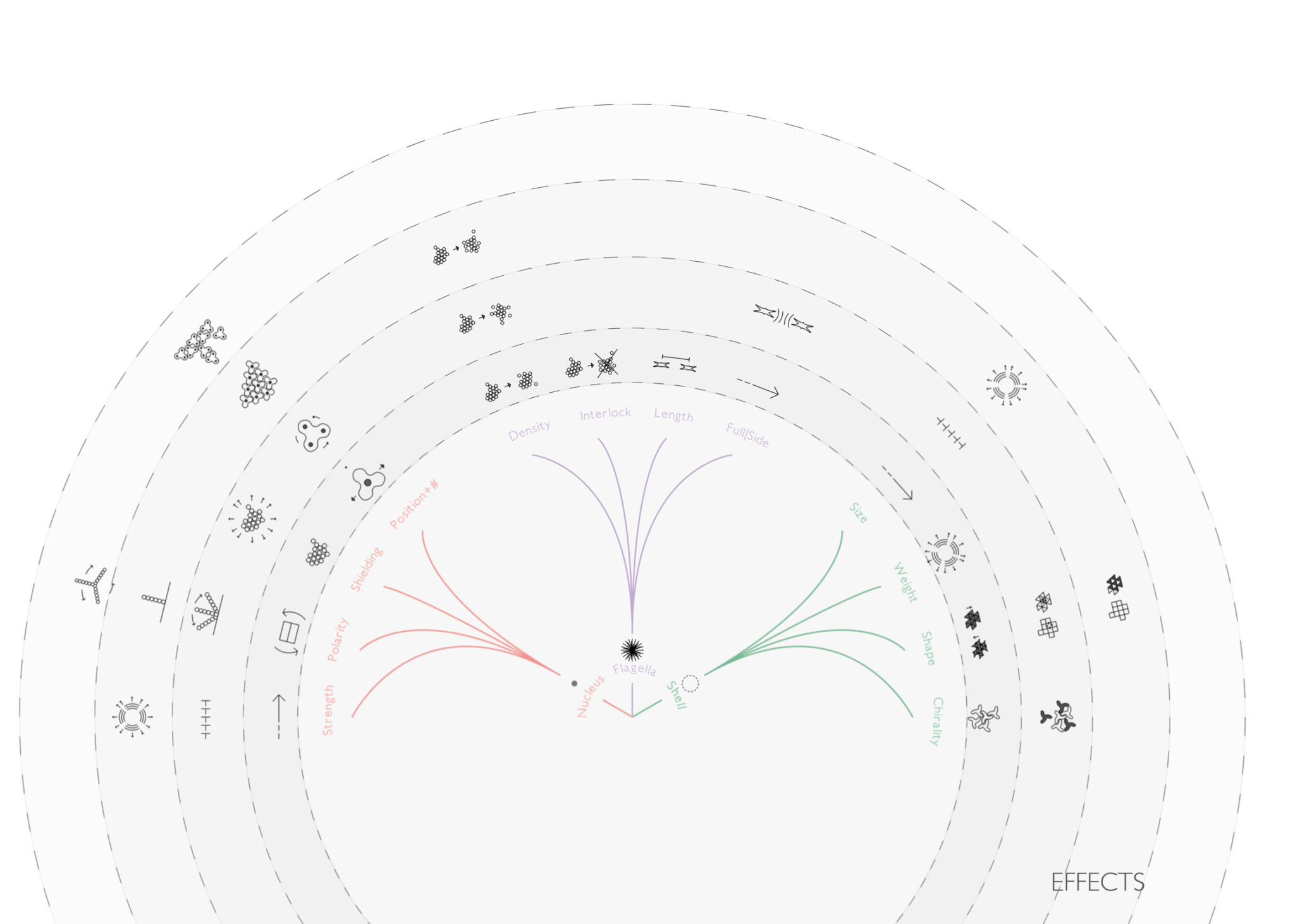
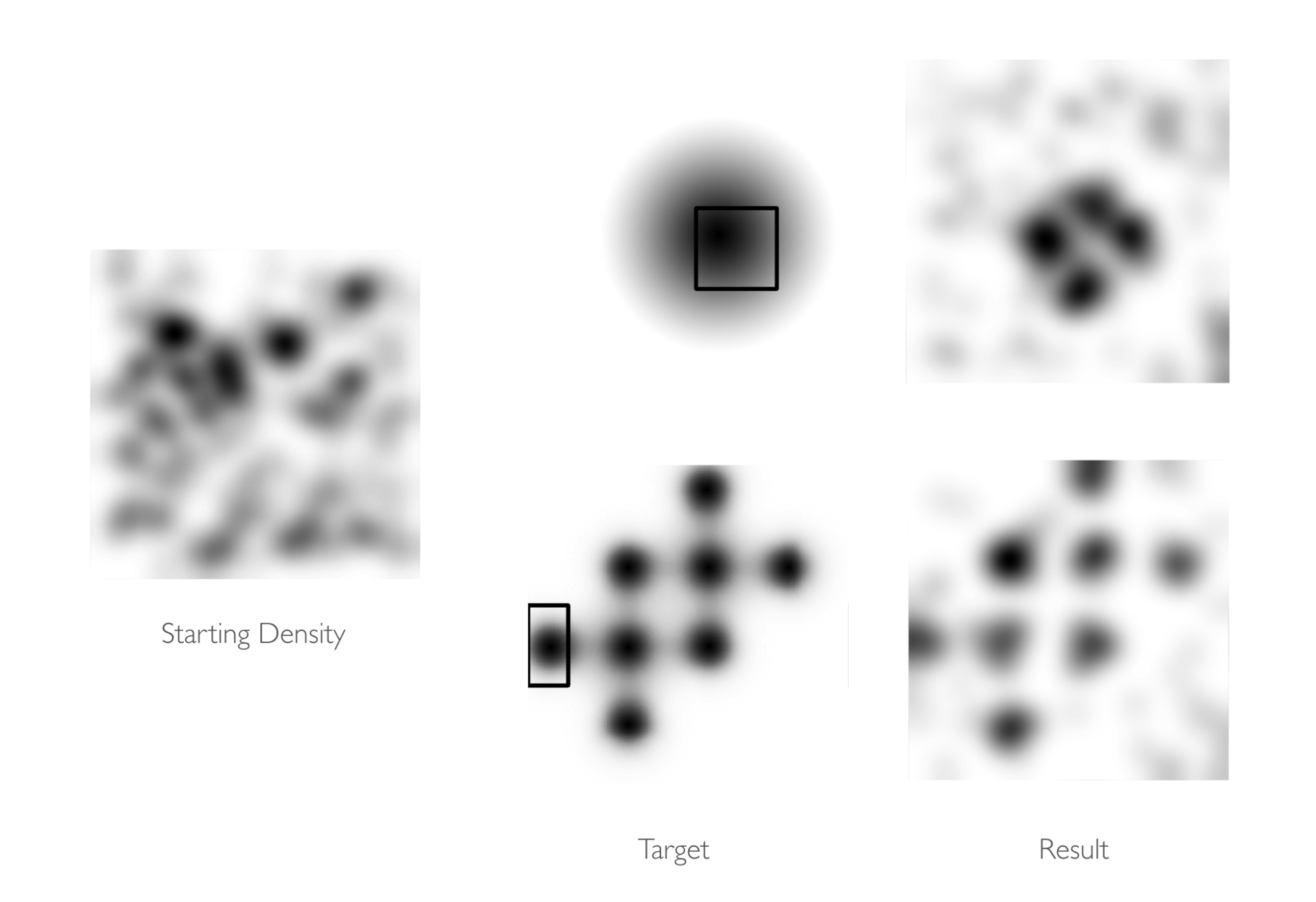
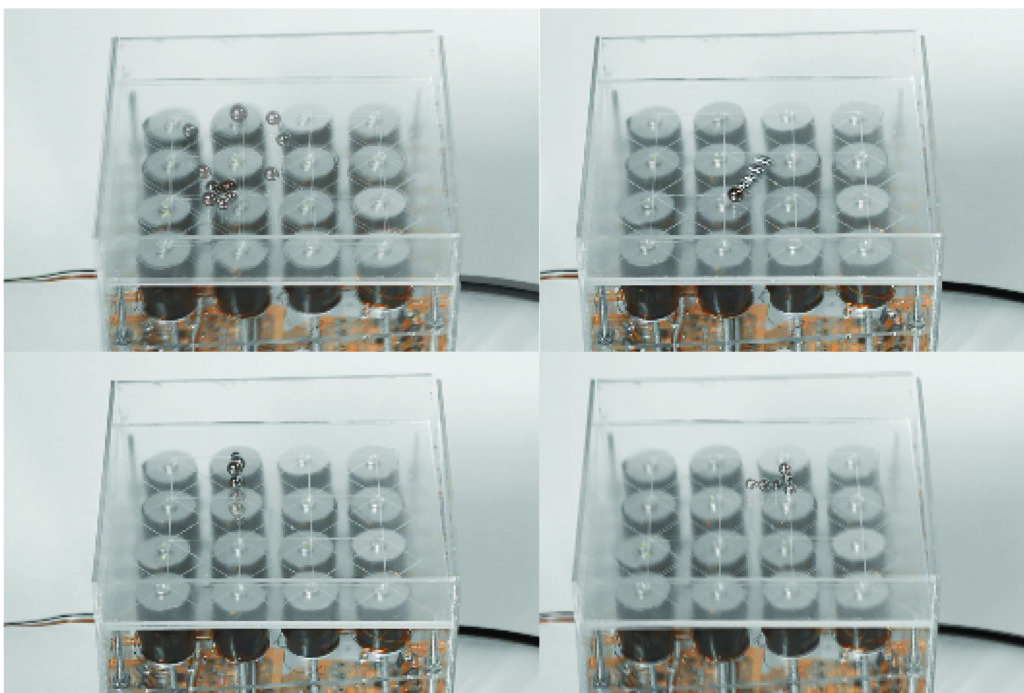
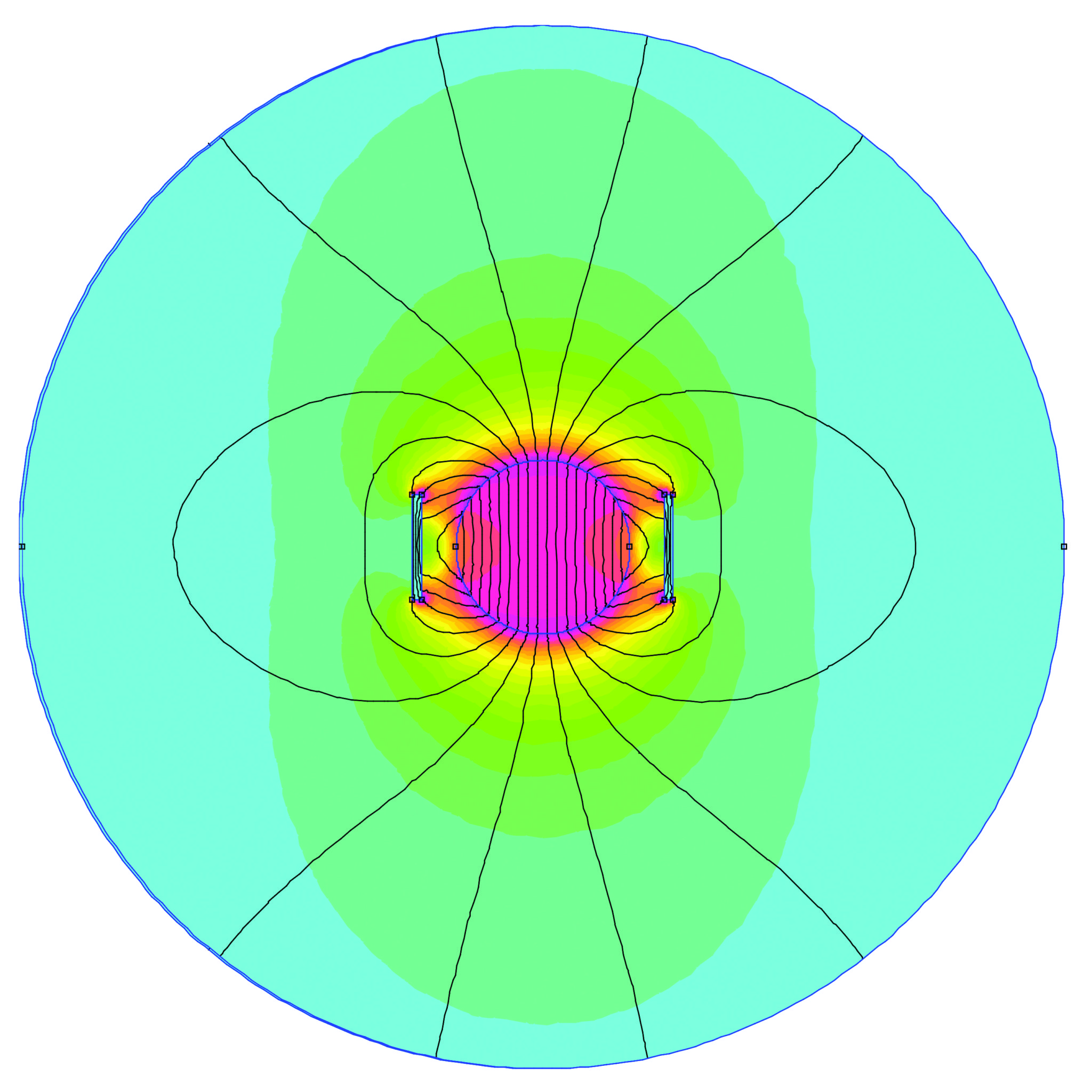
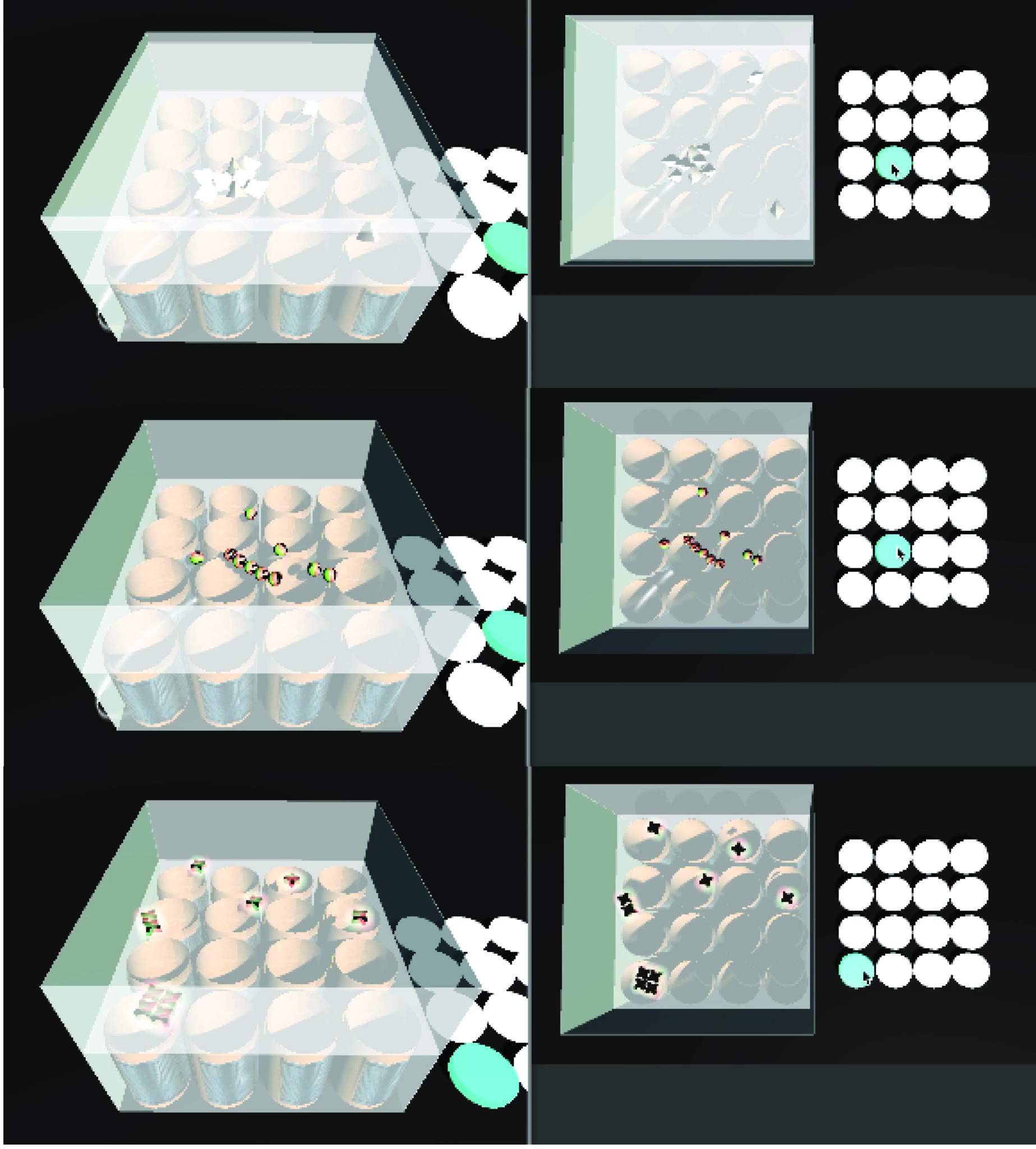
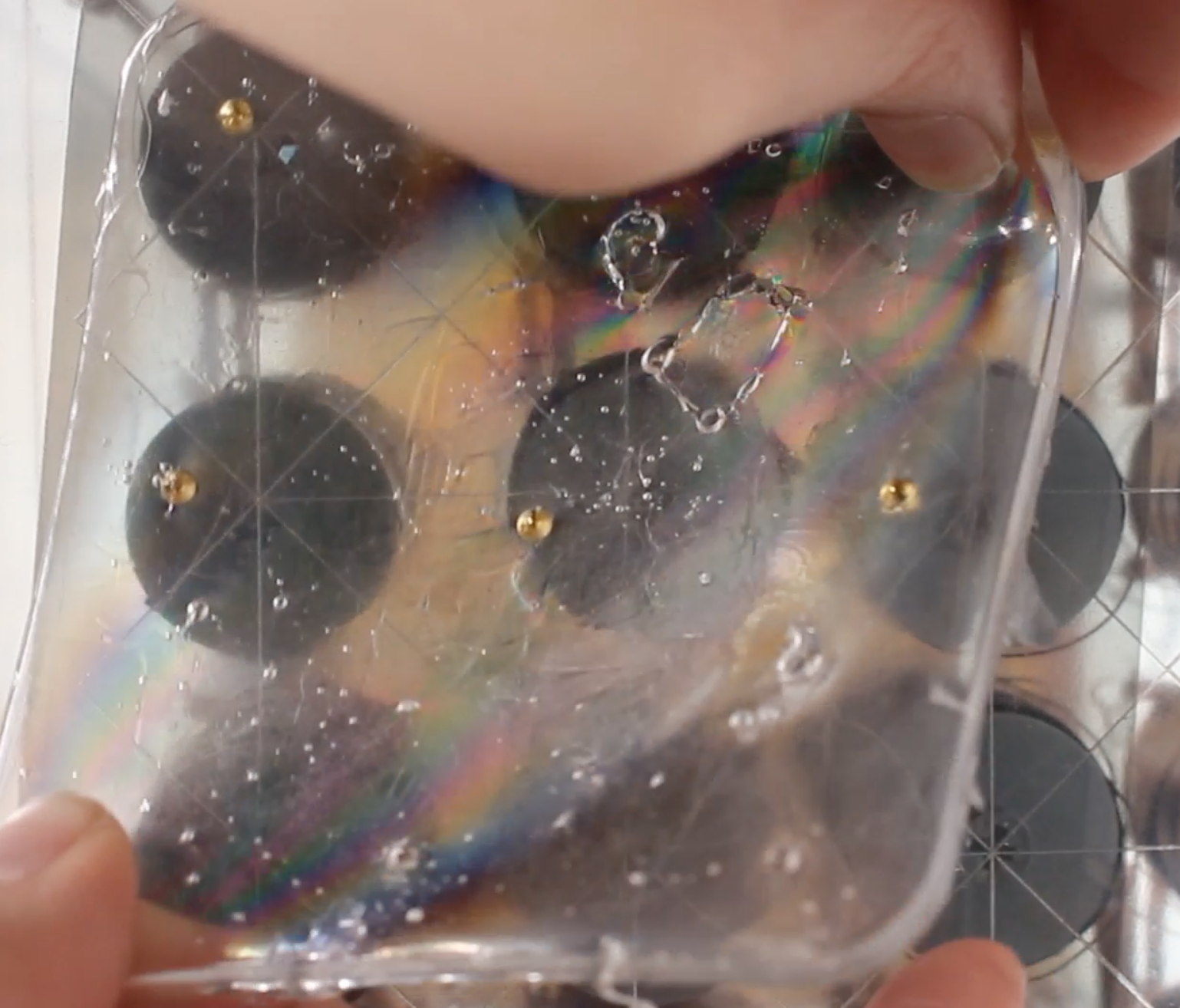
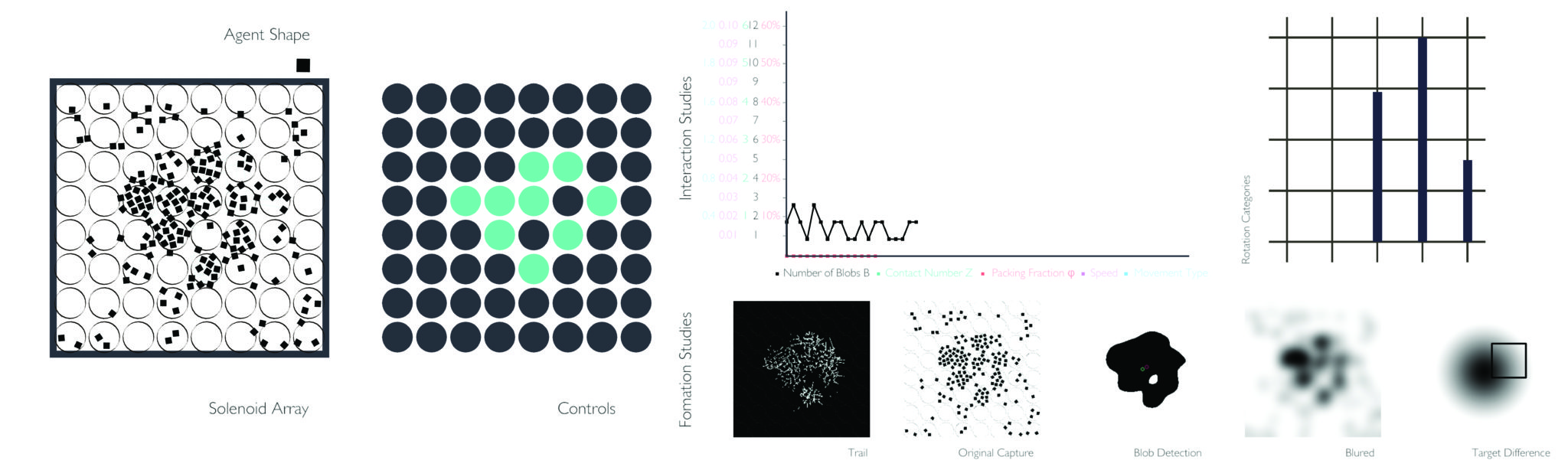
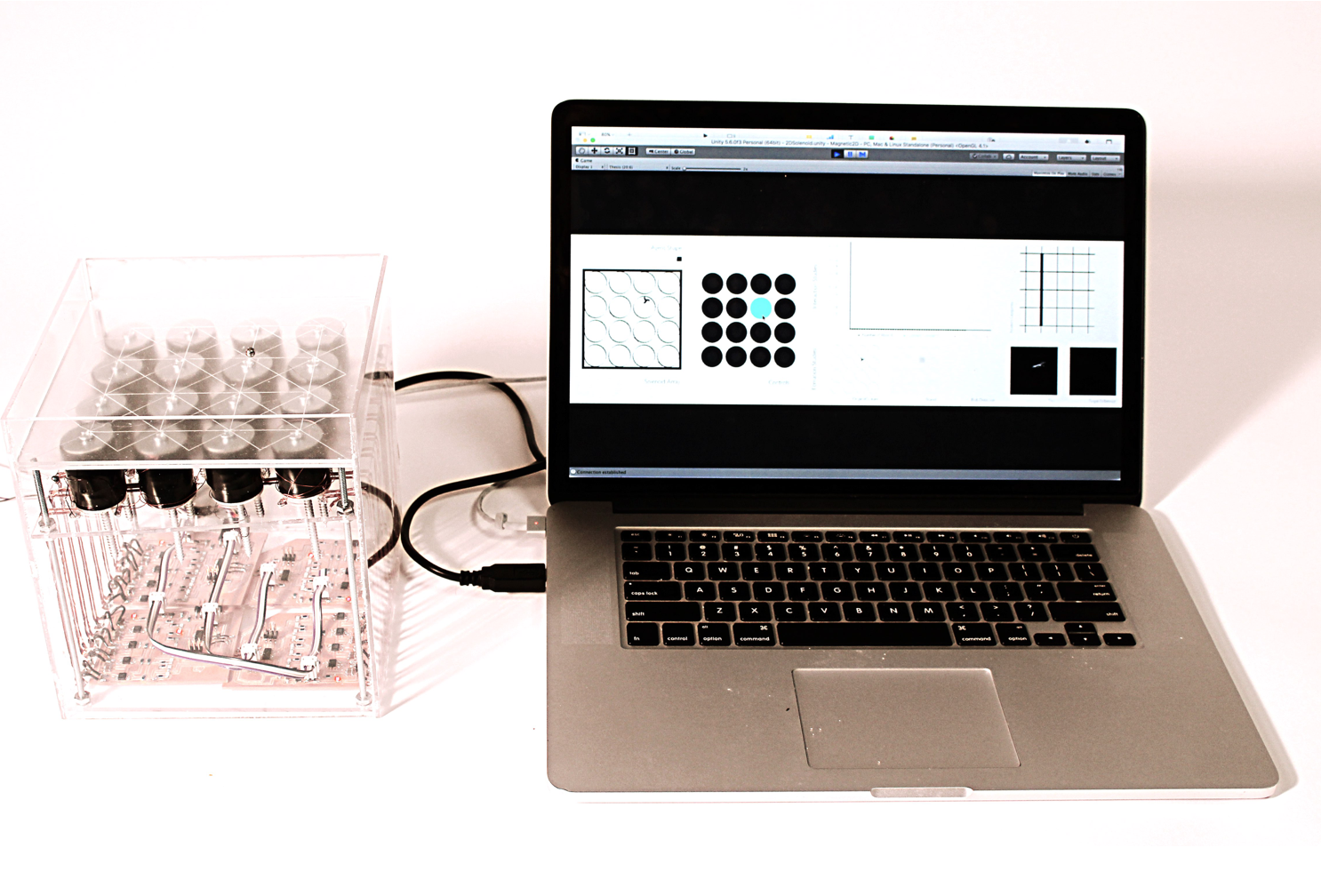
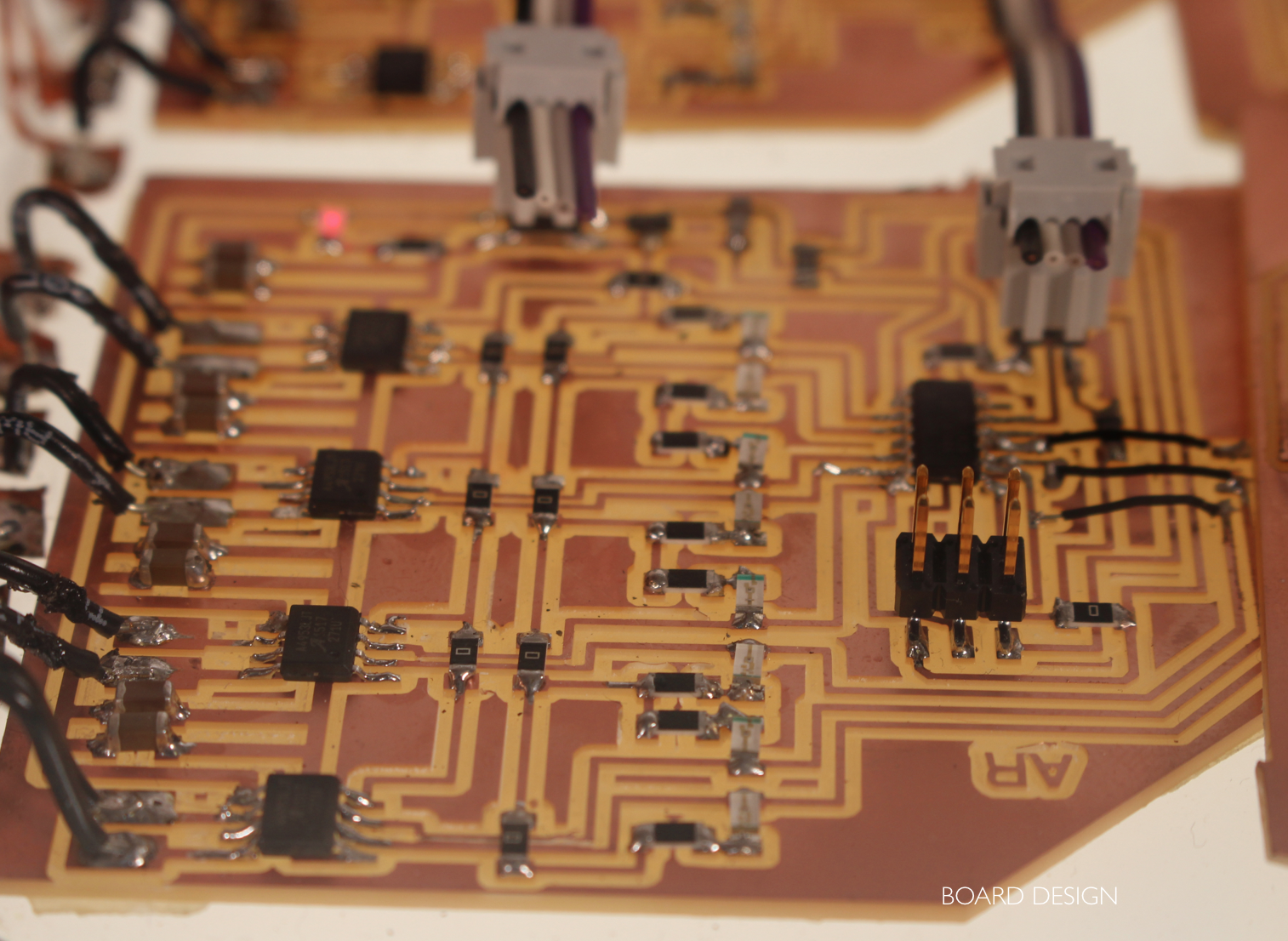
The initial exploratory study looks at various examples from nature like plankton and molecules. Magnetic actuation is chosen as the external actuation force between agents. The research uses simultaneous digital and physical investigations to understand and design the interactions between agents. The project offers a systemic investigation of the effect of shape, interparticle forces, and surface friction on the packing and reconfiguration of granular systems. The ability to change the system state from a gaseous, liquid, then solid state offers new possibilities in the field of material computation, where one can design a “material” and change its properties on demand.
Harvard GSD | Spring 2017 | Individual

