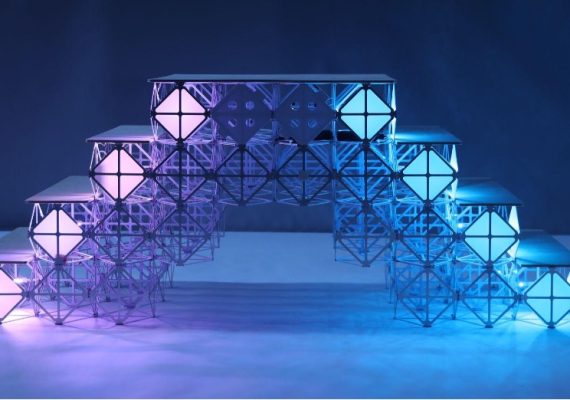
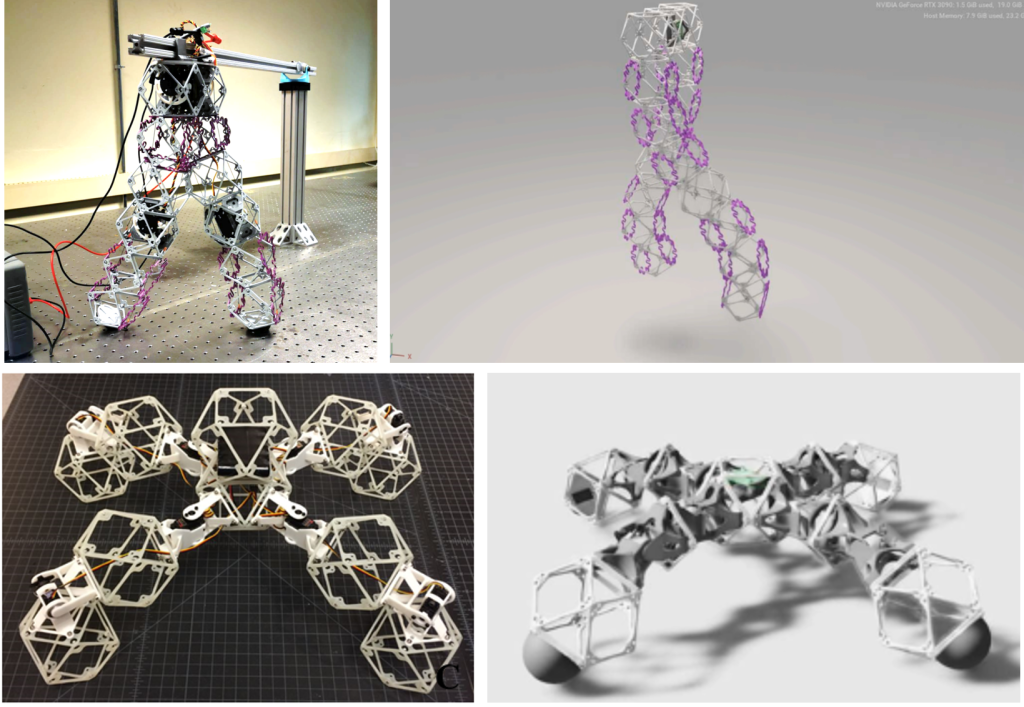
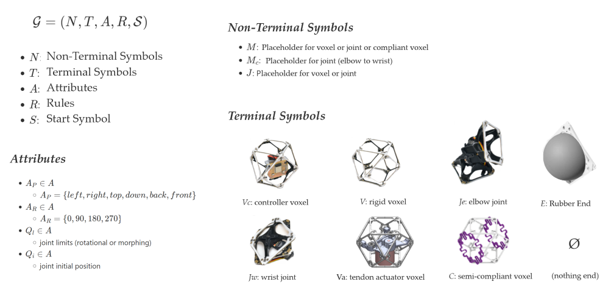
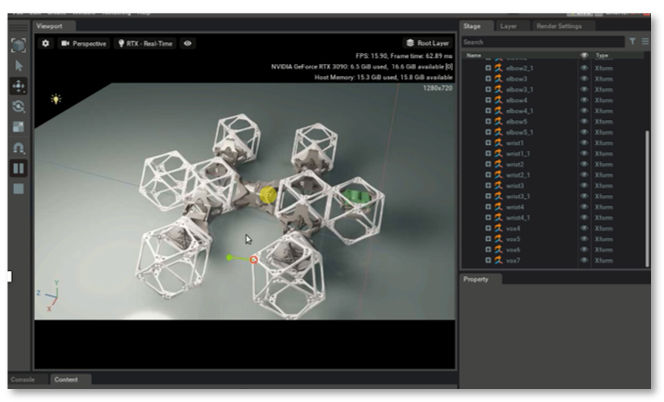
During my internship at NVIDIA, I developed an Omniverse Kit Extension to design, simulate MetaVoxels (robots composed of discrete modular voxels with different mechanical properties).
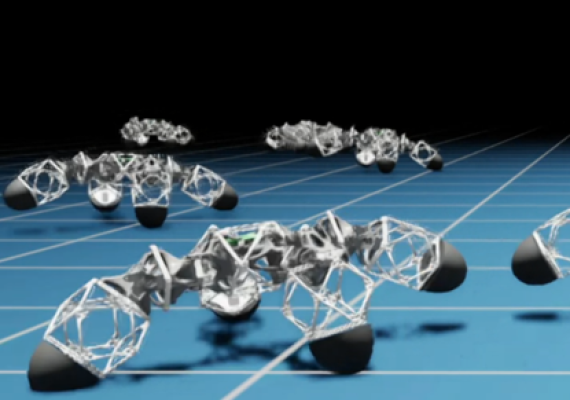
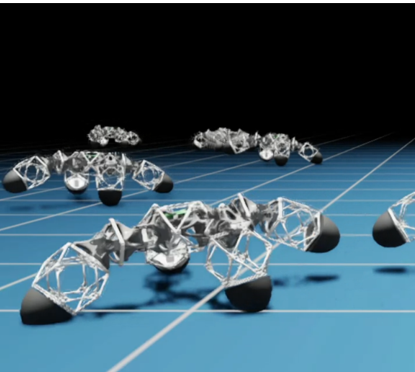
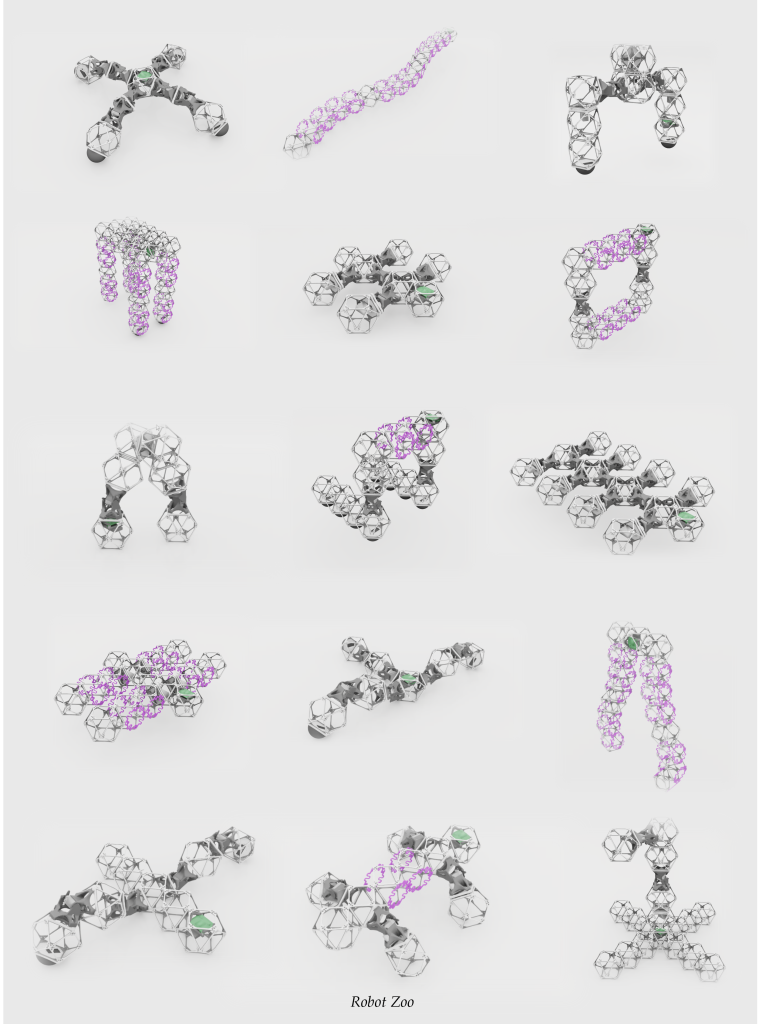
I first developed a robot shape grammar and rules to describe how they can be built. This rules are then used to search for the best robot architecture (shape) and control given a task.
Isaac sim was used to simulate the robots and Isaac Gym for the multi-GPU reinforcement learning (RL) workflow.
GitLab Link: https://www.cba.mit.edu/amiraa/nvidia-omniverse-metavoxels