

Professor: Andrew Witt
Course: Mechatronic Optics
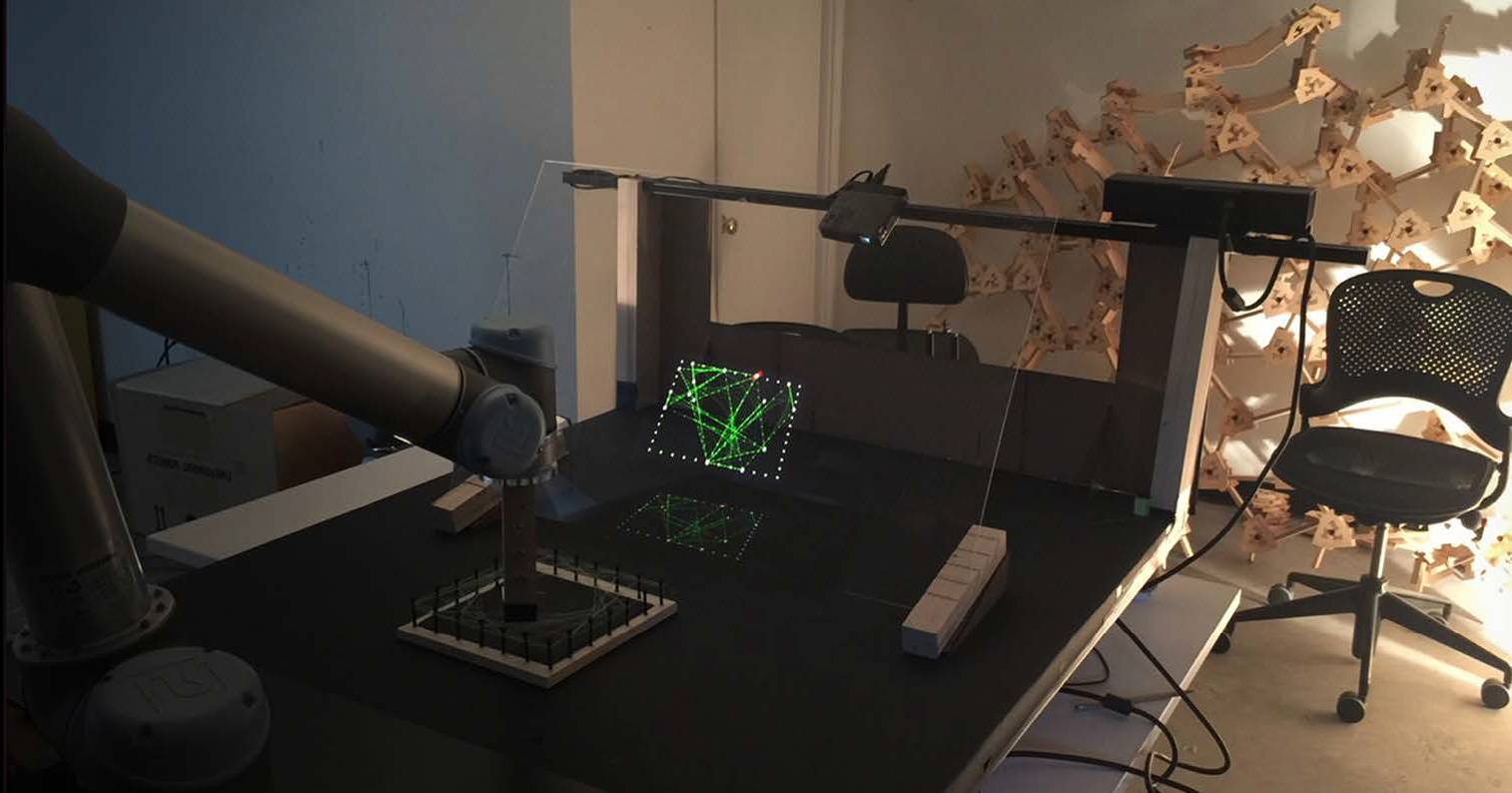
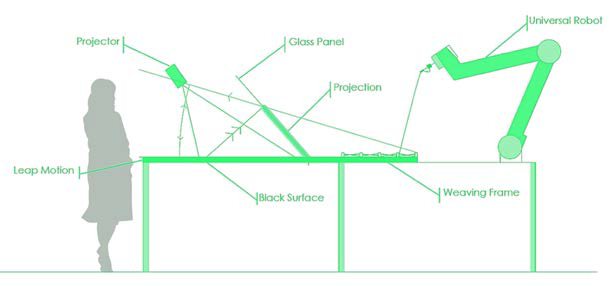



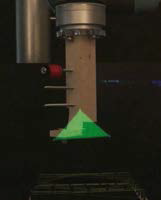


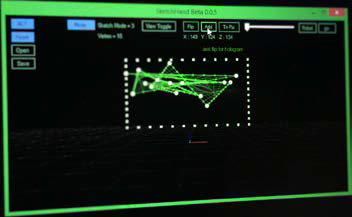



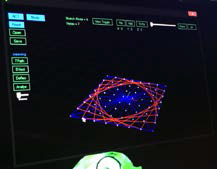
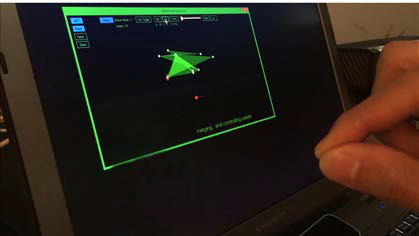
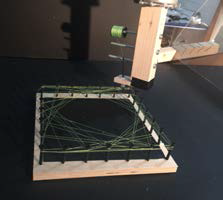
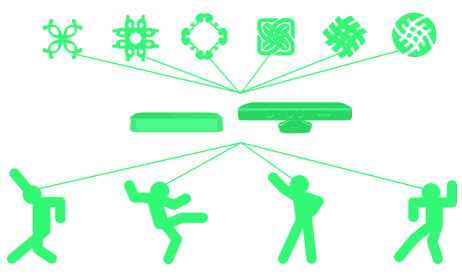
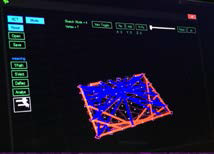
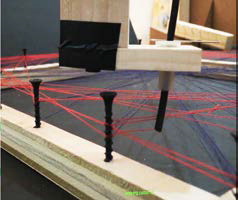

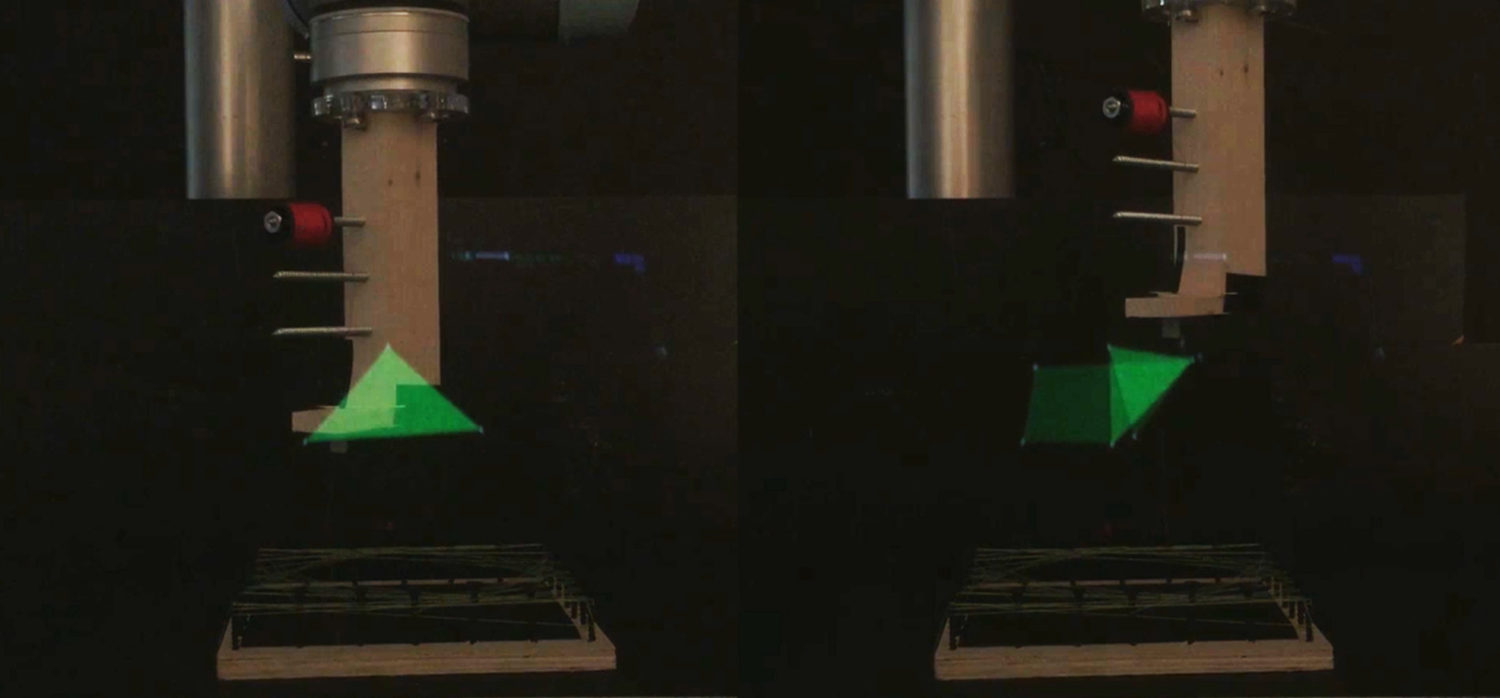
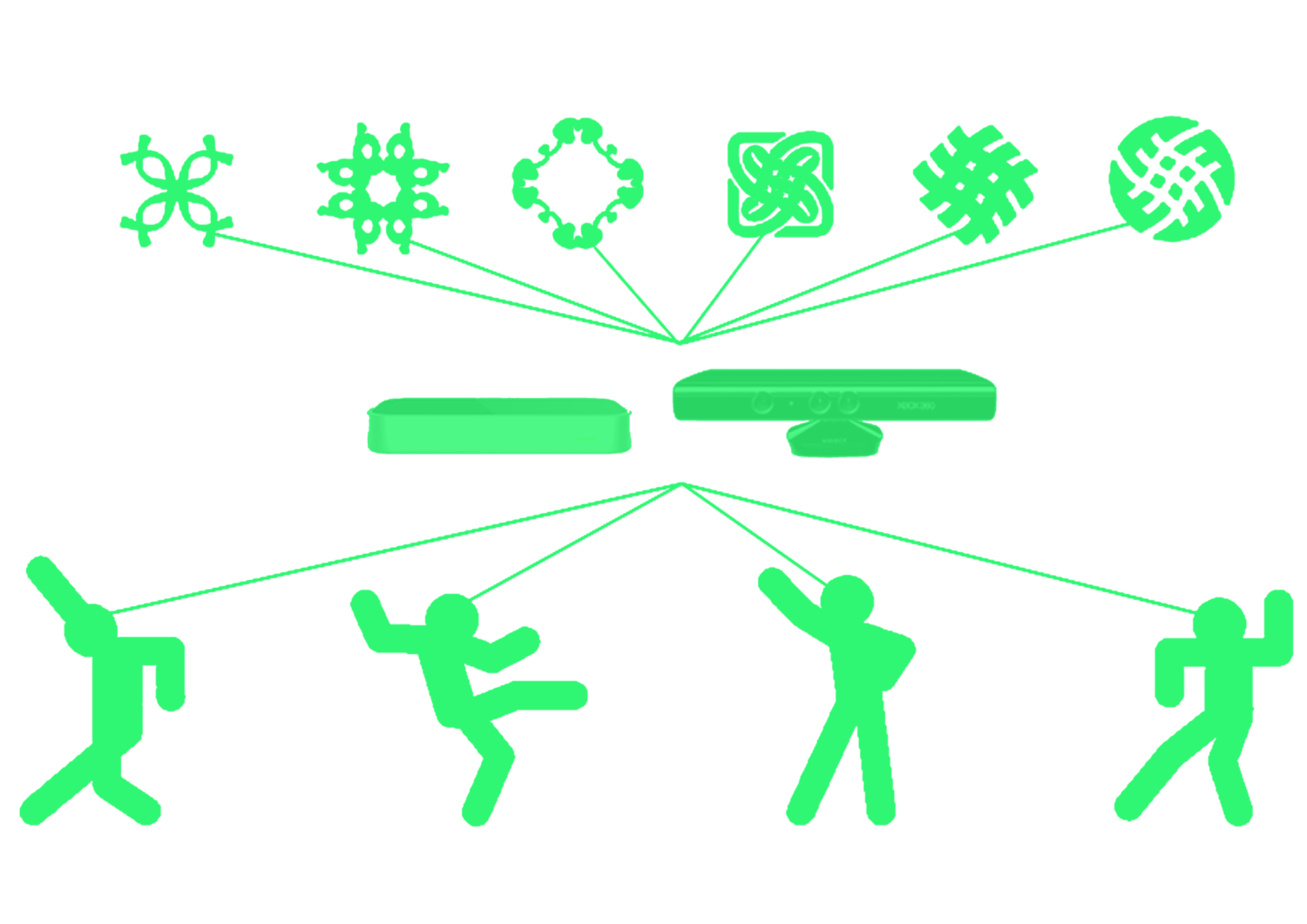
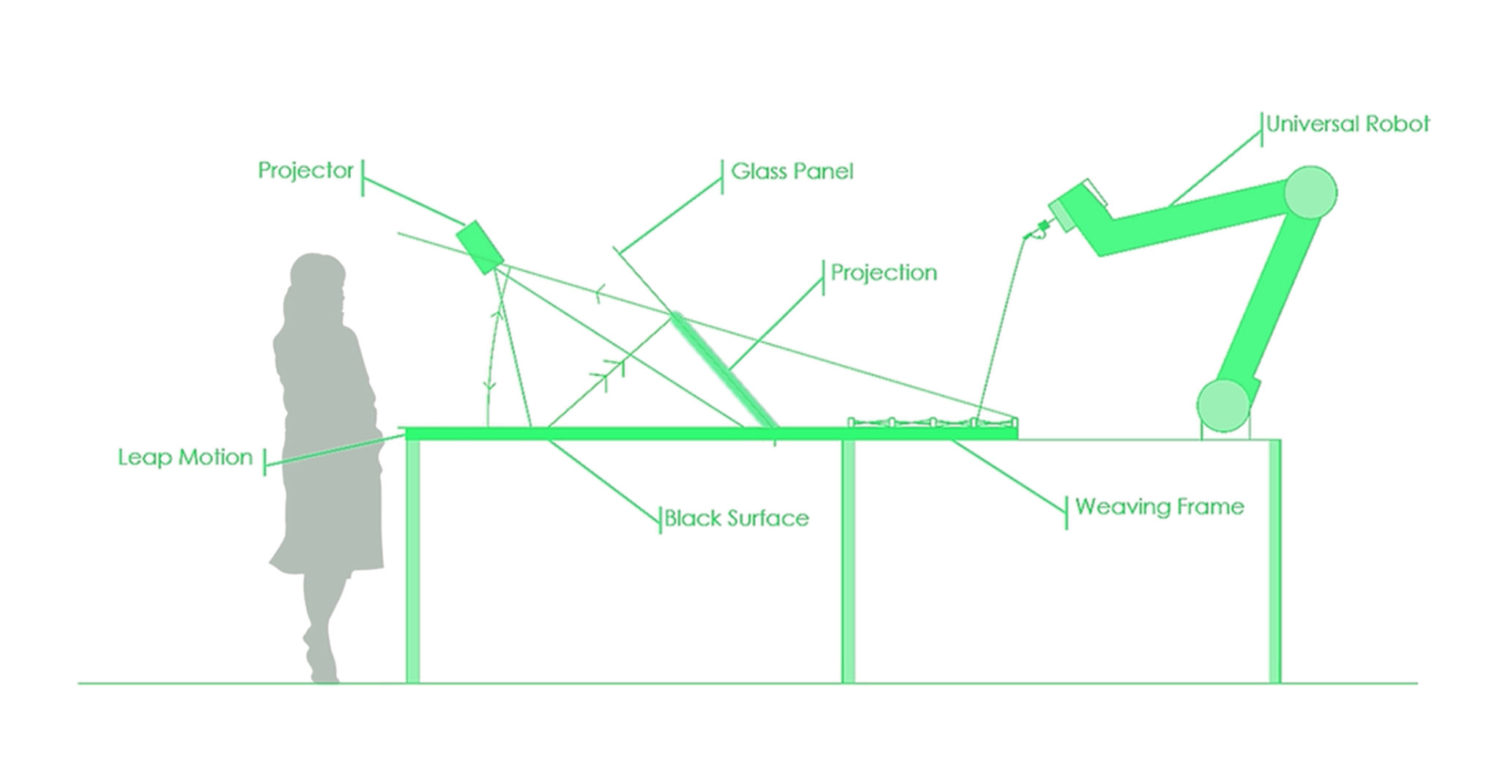
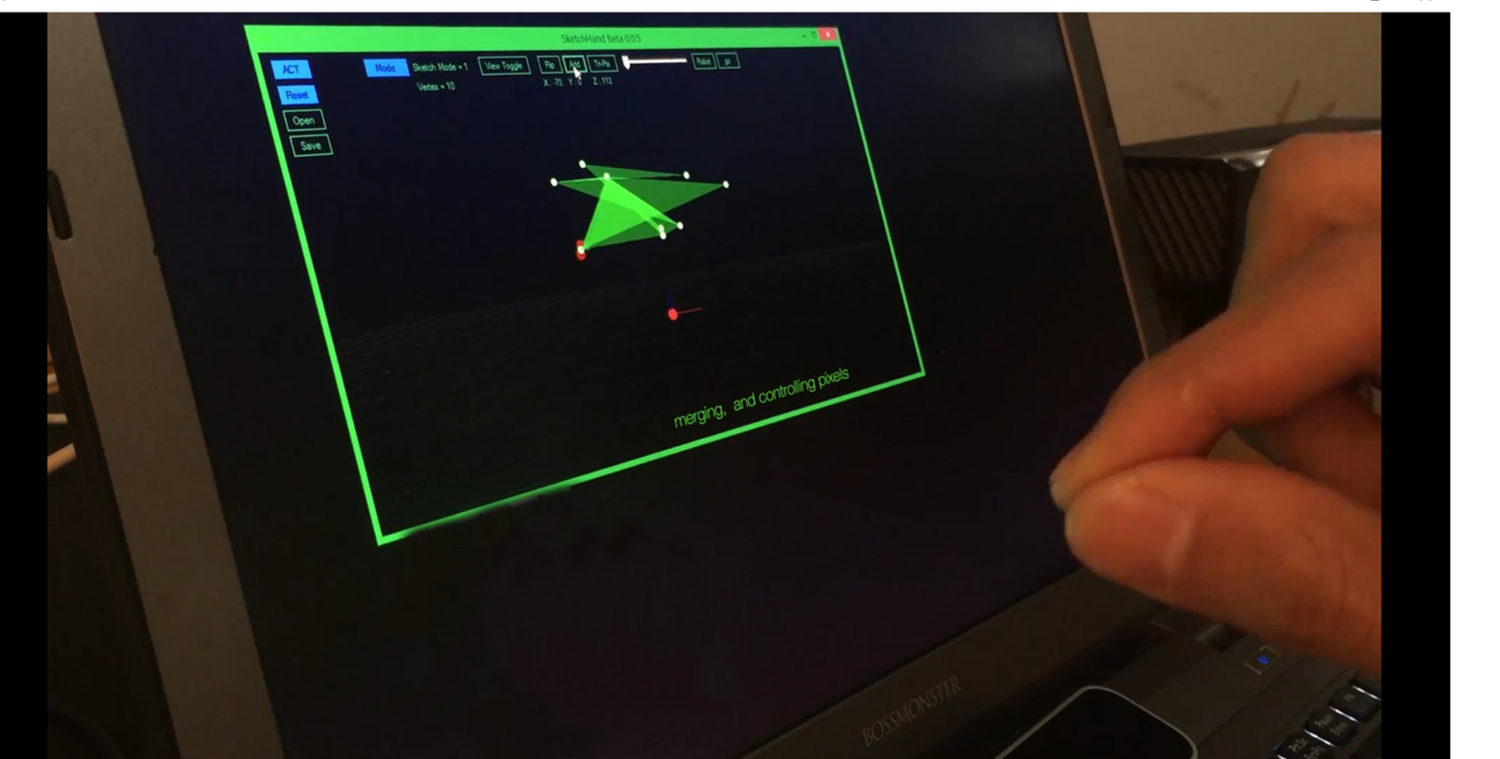
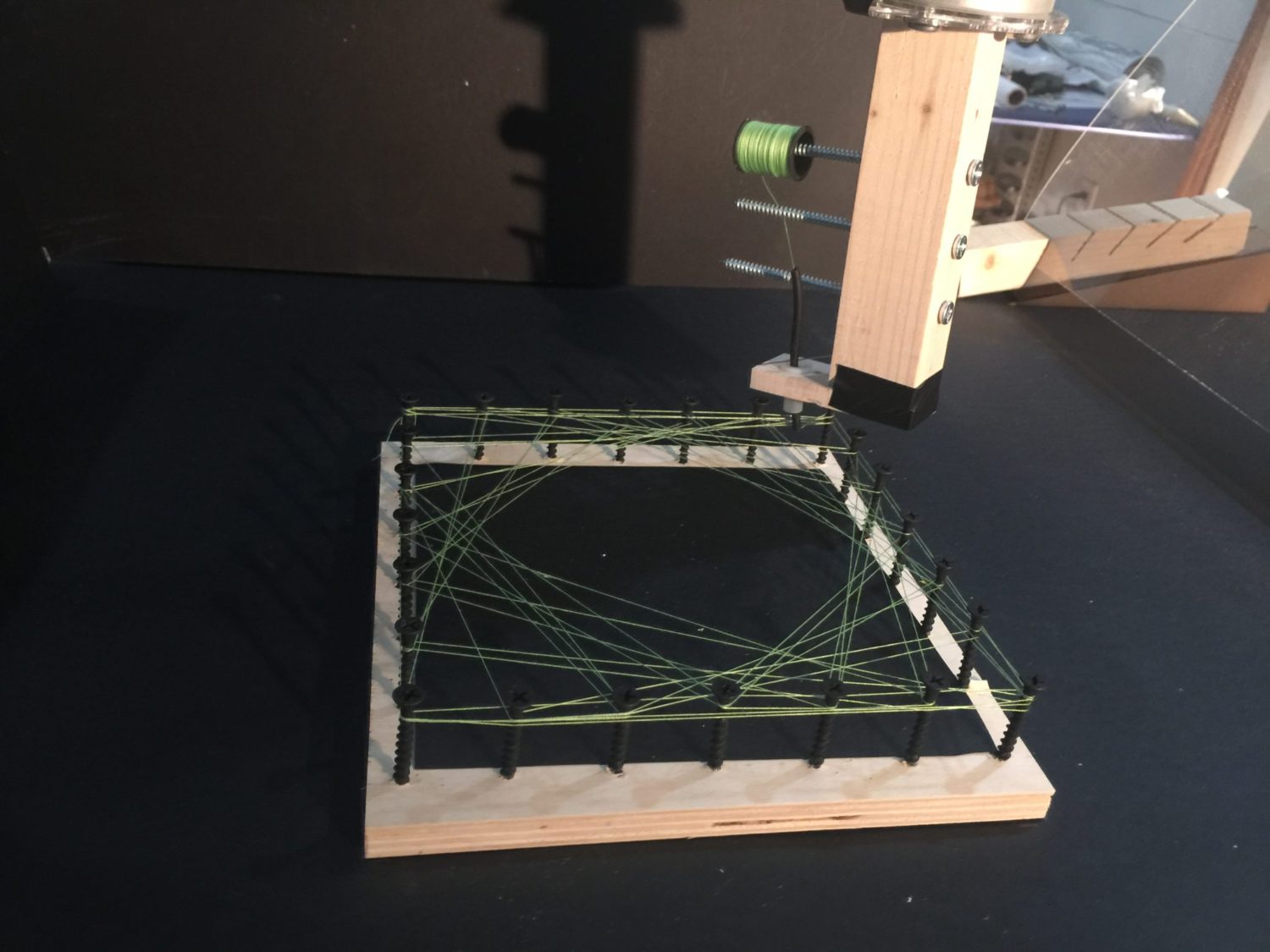
The objective of the project was to develop creative and interactive tools for designers to view, analyze and fabricate their designs only using simple gesture movements. The software “SketchHand” was developed to act as a link between the gestural movement capture, the design and output analysis, and the robotic control. The hologram was the projection technique. The user is able to not only choose or design a pattern, but also to get its instant stress analysis. The tool-path is automatically calculated and the pattern is woven, ensuring an augmented robotic-interaction.
Harvard GSD | Fall 2015 | Group of 2